
-
- Tin tiêu điểm
-
Bộ điều khiển linh hoạt cho robot đa năng
Trong bối cảnh các thế hệ robot tương lai cần phải trở nên đa năng và “tinh vi” hơn, TS. Nguyễn Văn Trường (Đại học Công nghiệp Hà Nội) và các cộng sự đã cho ra đời một bộ điều khiển robot mới linh hoạt hơn, hứa hẹn sẽ cải thiện hiệu quả các robot dịch vụ tại nhà hàng, bệnh viện hoặc sân bay.
Cải thiện khả năng điều hướng
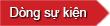
Tìm hướng đi khác so với các giải pháp điều khiển robot trước đây, TS. Nguyễn Văn Trường và các cộng sự từ Viện Công nghệ Shibaura (Nhật Bản), Đại học Queen’s Belfast (Vương quốc Anh), Đại học Khoa học và Công nghệ Quốc gia Đài Loan và Viện Kỹ thuật và Công nghệ Thapar (Ấn Độ) đã nghiên cứu và phát triển một bộ điều khiển PID phi tuyến tính thích ứng (NPID) mới được tích hợp với mạng neuron hàm cơ sở bán kính (RBFNN) cho ballbot, cung cấp khả năng tính toán nhẹ, độ ổn định vượt trội, giảm tiếng kêu và tăng độ bền trước các nhiễu loạn bên ngoài. Nhóm nghiên cứu lựa chọn các thiết lập ban đầu của bộ điều khiển thông qua tối ưu hóa chuyển động tổng hợp cân bằng và liên tục cải thiện luật điều khiển thích ứng trong quá trình vận hành để xử lý ước tính lực bên ngoài theo thời gian thực.
|
Ballbots với bộ điều khiển tiên tiến có thể được sử dụng làm robot hỗ trợ cho các nhiệm vụ đòi hỏi khả năng di động và độ chính xác cao. Chẳng hạn, chúng có thể hỗ trợ những cá nhân gặp khó khăn khi di chuyển và xác định hướng trong các môi trường phức tạp. Ngoài ra, chúng có thể được sử dụng làm robot dịch vụ trong các địa điểm như nhà hàng, bệnh viện hoặc sân bay, đem lại khả năng điều hướng mượt mà hơn”.
TS. Nguyễn Văn Trường |
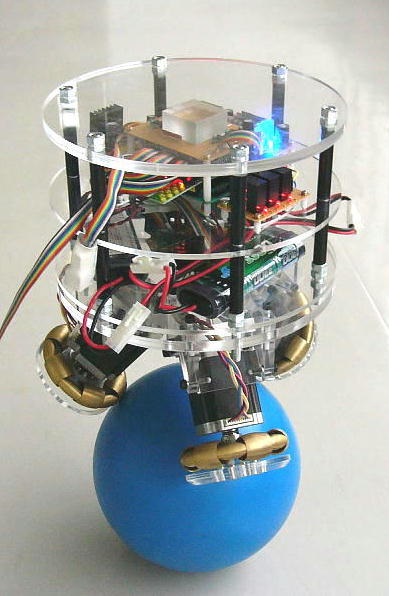
Để đánh giá hiệu quả của hệ thống, nhóm nghiên cứu đã tiến hành thử nghiệm trong hai trường hợp khác nhau. Trong trường hợp đầu tiên, họ đặt hệ thống ballbot vào trạng thái thẳng đứng, sau đó, lần lượt truyền chương trình điều khiển theo từng bộ điều khiển PID, NPID và NPID-RBFNN vào hệ thống và khởi động nó. “Thí nghiệm không có yếu tố nhiễu này sẽ đánh giá khả năng tự cân bằng của cả ba bộ điều khiển”, nhóm nghiên cứu cho biết. Trong thí nghiệm thứ hai, các điều kiện ban đầu của ba bộ điều khiển được kiểm tra theo cách tiếp cận tương tự như trong trường hợp đầu tiên. Khi hệ thống ballbot đạt đến trạng thái cân bằng ổn định, nhóm nghiên cứu bắt đầu tính thời gian, và tại thời điểm 4 giây, họ sẽ áp dụng một lực tác động bên ngoài lên hệ thống.
Lượt xem: 814
Tin mới nhất:
- ❧ Xăng E10 phù hợp với hầu hết ô tô, xe máy tại Việt Nam - theo thử nghiệm 10 năm -
- ❧ Vắc-xin ung thư mRNA hứa hẹn thay thế cho phẫu thuật, xạ trị và hóa trị -
- ❧ Bước tiến lớn trong công cuộc xác định danh tính liệt sĩ -
- ❧ Tế bào mỡ “đói” có thể giết chết ung thư -
- ❧ Bản đồ bộ não lớn nhất từ trước đến nay -
◆ Tổ chức triển khai Giải thưởng Sáng tạo Khoa học công nghệ Việt nam năm 2026
◆Quyết định thành lập BTC cuộc thi Sáng tạo thanh thiếu niên nhi đồng
◆Quyết định ban hành Thể lệ Cuộc thi Sáng tạo Thanh thiếu niên nhi đồng tỉnh Tuyên Quang năm 2026
◆Kế hoạch Triển khai cuộc thi Sáng tạo TTN-NĐ tỉnh Tuyên Quang năm 2026
◆Quyết định V/v thành lập Ban tổ chức Hội thi Sáng tạo kỹ thuật tỉnh Tuyên Quang
◆Quyết định ban hành Thể lệ hội thi Sáng tạo Kỹ thuật tỉnh Tuyên Quang năm (2026-2027)
◆Kế hoạch tổ chức hội thi Sáng tạo Kỹ thuật tỉnh Tuyên Quang năm 2026-207
- Phó Chủ tịch Liên hiệp... 14/01/2016






